Principal investigator(s): Ayman Habib, professor, civil engineering, Purdue University, ahabib@purdue.edu; Songlin Fei, professor, Forestry and Natural Resources, Purdue University, sfei@purdue.edu
Manual forest inventory is labor intensive and costly. Automation, which takes advantage of recent advances in light detection and ranging (LiDAR) systems and data analytics, should make forest inventory less expensive, more precise and faster, while allowing for fine-resolution inventory at a scale.

The backpack system for high resolution forest inventory research project is focused on developing a BackPack system equipped with LiDAR, RGB camera(s) and a positioning and orientation system (i.e., integrated global navigation satellite system and inertial navigation system – GNSS/INS). To date, several systems have been developed, with the latest prototype going into a commercialization phase, where two systems are being requested by an academic research institute.
In addition to the hardware development, researchers focused on two data processing aspects. First, a trajectory enhancement and mapping (TEAM) data processing system has been developed to mitigate the intermittent access to GNSS signal under forest canopy. Second, following the TEAM-based point cloud generation, a data processing pipeline has been developed to derive fine-resolution biometrics of detected individual trees. The results from the data processing chain include fine-resolution point clouds with good positional accuracy (in both the relative and absolute sense). The point clouds are then ingested into a data processing pipeline to derive inventory metrics such as individual tree detection, localization and segmentation. The point clouds for the segmented trees are finally used to derive tree height, diameter at breast height (DBH) and stem curve.
The developed system together with the data processing workflow enable natural resources professionals, managers and landowners to derive cost-effective inventory metrics for large areas while ensuring the precision of derived information. These innovations will reduce the cost and time for field crew data acquisition, yet provide more complete information about forest stands than was feasible before and ensure the availability of actional information for better decision making.

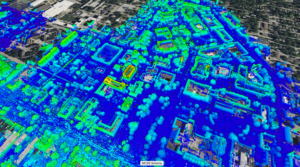
Another component of the research focused on expanding the application scope of the developed BackPack unit to allow for its utilization on an e-bike (BikePack) as well as an autonomous robotic system. The BikePack system has been utilized for a Purdue University campuswide data acquisition. The collected data have been augmented with airborne data for a more complete representation of the scanned environment (e.g., building rooftops and other infrastructure). The developed system was tested in a wide range of environments, including plantations and natural forests in Indiana, Great Smoky Mountains National Park, the Brazilian Amazon and chimpanzee habitats in Senegal. Preliminary results from the hardware and software developments are quite promising. The HTIRC research enabled a chain of other state, federal and international funding opportunities (e.g., forest managers, anthropologists, carbon credit accounting and small forest owners).
So far, the system and data analytics developed have focused on geometric characteristics of trees. The last phase of the research deals with integrating LiDAR point clouds with imagery captured by RGB digital cameras. The integration process will allow for group-species identification (e.g., using bark images and leaf structure). The augmentation with imaging systems will be expanded to include multi/hyperspectral cameras. This augmentation will allow for deriving more information, such as specific species and disease condition.
“This project has been rewarding for the investigators and research team from two aspects,” Ayman Habib said. “It allowed us to expand our prior research, which focused on using mobile mapping systems for infrastructure assessment and monitoring to mapping, monitoring and management of forest ecosystems. It also enabled us to provide a wall-to-wall development of data acquisition and processing framework for forest inventory that is ready for commercial adoption.”
Goals:
The project objectives are to: optimize system integration, data logging and deployment of a BackPack LiDAR system; develop data processing and biometrics extraction algorithms; and to share tools and methods with HTIRC researchers and stakeholders in trainings and workshops.
Methods:
The research focused on developing a backpack system equipped with LiDAR, RGB camera(s), position and orientation system (i.e., integrated global navigation satellite system and inertial navigation system – GNSS/INS).
In addition to the hardware development, a trajectory enhancement and mapping (TEAM) data processing system has been developed to mitigate the intermittent access to GNSS signal under the forest canopy. Following the TEAM-based point cloud generation, a data processing pipeline has been developed to derive fine-resolution biometrics of detected individual trees.
 Key Findings in 2024:
Key Findings in 2024:
- To date, the team has developed seven BackPack LiDAR systems. Data acquisition protocols and user manuals have been established for each. The latest prototype has moved into a commercialization phase.
- In addition to the deployment of the BackPack LiDAR, UAV LiDAR missions have been conducted.
- Strategies have been developed for trajectory enhancement and mapping (TEAM) to mitigate GNSS signal outages while collecting data under the forest canopy. The results from the data processing chain using the developed BackPack systems include fine-resolution point clouds with good positional accuracy (in both relative and absolute senses).
- Data analytics strategies have been developed for forest biometrics extraction, including ground/nonground filtering, individual tree detection, localization and segmentation. The point clouds can then be used to derive tree height estimation, DBH evaluation and stem curve.
- A web portal has been developed for the visualization of point clouds and derived products.
- The BackPack system has been incorporated into a BikePack unit. The entire Purdue campus was covered by the BikePack system during the fall semester.
- A pipeline has been developed to ensure the alignment of the BackPack/BikePack LiDAR point cloud with legacy geospatial data (e.g., 3DEP LiDAR data).
- Individual tree segmentation results have been augmented with imagery data, which will be used to identify tree species.
- Research findings have been disseminated in several presentations, conference proceedings and peer-reviewed journal papers.
Publications:
- Integration of Near Proximal and Proximal LiDAR Sensing for Fine-resolution Forest Inventory. Accepted for publication, Photogrammetric Engineering and Remote Sensing Journal (PERS). Habib, A.; Zhao, C.; Hanafy, H.; Eissa, A.; Aboelmaaty, Y.; Shao, J.; and Fei, S.; 2024.
- Large-scale inventory in natural forests with mobile LiDAR point clouds, Science of Remote Sensing, Volume 10, 2024, 100168, ISSN 2666-0172, https://doi.org/10.1016/j.srs.2024.100168. Shao, J.; Lin, Y.C.; Wingren, C.; Shin, S.Y.; Fei, W.; Carpenter, J.; Habib, A.; Fei, S.; 2024.
- Forest feature LiDAR SLAM (F2 -LSLAM) for backpack systems. ISPRS Journal of Photogrammetry and Remote Sensing, Volume 212, 2024, Pages 96-121, ISSN 0924-2716, https://doi.org/10.1016/j.isprsjprs.2024.04.025. Zhou, T.; Zhao, C.; Wingren, C.P.; Fei, S.; and Habib, A., 2024.
Future Research:
The last phase of the research deals with integrating LiDAR point clouds with imagery captured by RGB digital cameras. The integration process will allow for group-species identification (e.g. using bark images and leaf structure). The augmentation will allow for deriving more information such as specific species and disease condition.
Key Partners/Collaborators:
Guofan Shao, professor emeritus, Forestry and Natural Resources, Purdue University
Joey Gallion, forest inventory program manager, Indiana Department of Natural Resources
Collaborators at Great Smoky Mountains National Park, in the Brazilian Amazon and at the chimpanzee habitats in Senegal